







คุณสมบัติเครื่อง:
1: แพลตฟอร์มอัจฉริยะที่ใช้ ROS
หุ่นยนต์ สร้างขึ้นบน ROS fra me และขับเคลื่อนโดย Raspberry Pi รองรับการขยายโมดูลาร์และการพัฒนาโอเพ่นซอร์ส ทำให้เหมาะสำหรับหลักสูตร AI และวิทยาการหุ่นยนต์
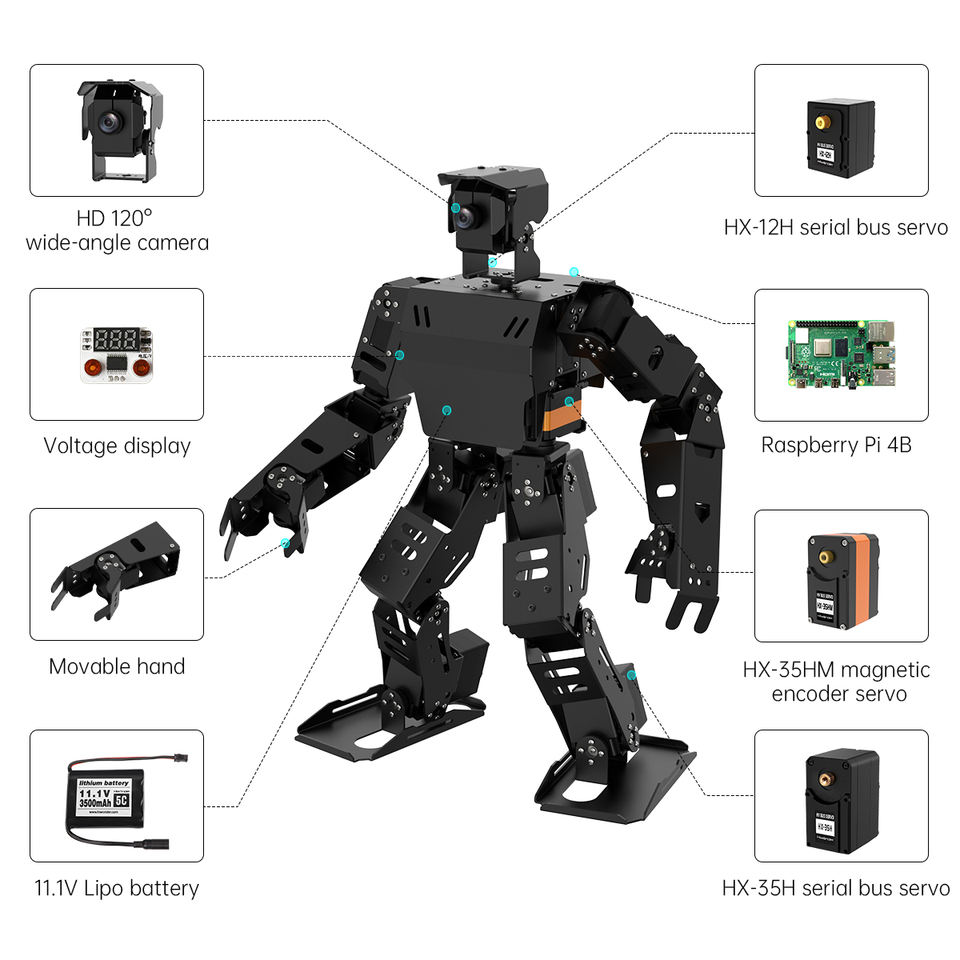
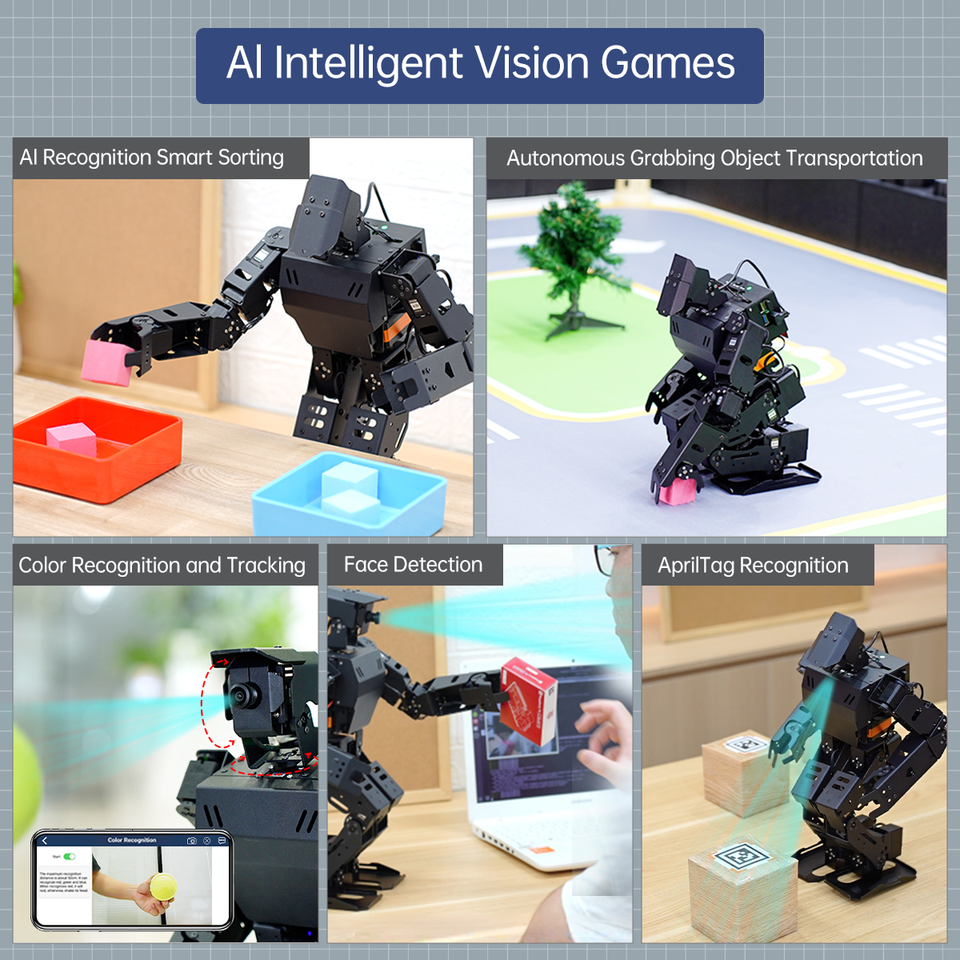
2: AI Vision และกล้อง 2DOF HD
มาพร้อมกับกล้อง HD มุมกว้าง 120° และรองรับ OpenCV สำหรับการประมวลผลภาพแบบเรียลไทม์ เช่น การจดจำสี การตรวจจับใบหน้า และการติดตามเป้าหมาย
โครงสร้างอะลูมิเนียมไบโอนิค DOF 3:24
เซอร์โวมอเตอร์แรงบิดสูงให้การควบคุมอิสระ 24 องศาอย่างแม่นยำ ช่วยให้หุ่นยนต์เดิน ปีน และทำการเคลื่อนไหวเหมือนมนุษย์ได้อย่างสมดุล
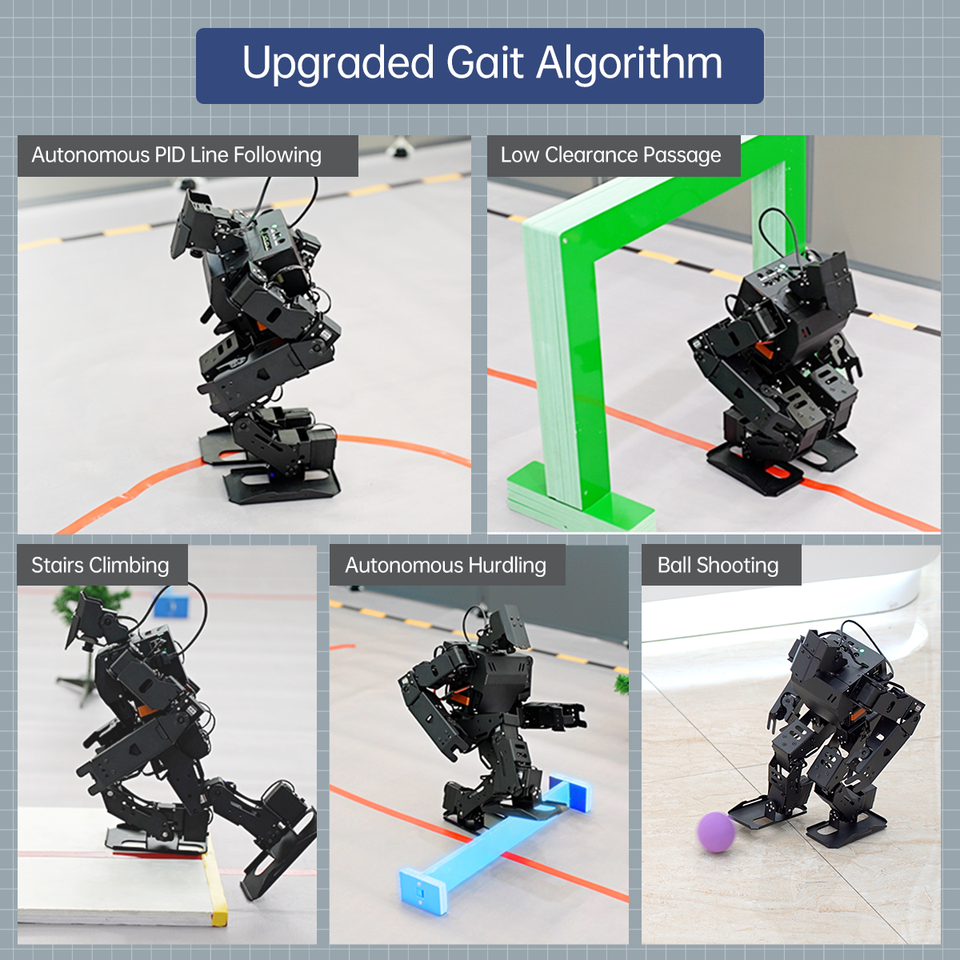
4: อัลกอริธึมการเดินที่มีเสถียรภาพในตัวเอง
ผสานรวมระบบควบคุมการเดินแบบกึ่งวงปิดสำหรับการแก้ไขท่าทางแบบเรียลไทม์และความสมดุลแบบไดนามิก ทำให้หุ่นยนต์มีความเสถียรขณะเคลื่อนที่
5: การสนับสนุนจลนศาสตร์และการจำลองแบบผกผัน
รวมเครื่องมือวิเคราะห์จลนศาสตร์แบบไบเพดและซอฟต์แวร์ดีบักจลนศาสตร์ผกผันที่ใช้ ROS เพื่อลดความซับซ้อนในการพัฒนาการเคลื่อนไหวและการทดสอบโครงการ
6: มือกลพร้อมระบบตอบรับการป้องกัน
มือหุ่นยนต์ที่ขยายได้มีการตอบสนองแบบเซอร์โวเกี่ยวกับมุมและอุณหภูมิ ให้การป้องกันที่ป้องกันการปิดกั้นและการจับวัตถุที่ปลอดภัย
ข้อกำหนดผลิตภัณฑ์:
| รายการ | รายละเอียด |
| ประเภทสินค้า | หุ่นยนต์ฮิวแมนนอยด์เพื่อการศึกษา |
| แอปพลิเคชัน | การศึกษาด้านหุ่นยนต์ / การฝึกอบรมการมองเห็นของ AI / การวิจัย STEM |
| ระบบปฏิบัติการ | ROS (ระบบปฏิบัติการหุ่นยนต์) |
| โปรเซสเซอร์ | โมดูลคอมพิวเตอร์ Raspberry Pi |
| องศาอิสระ (DOF) | การเคลื่อนไหวเต็มตัว 24 DOF |
| วัสดุโครงสร้าง | โครงอลูมิเนียมอัลลอยด์กลึง CNC |
| ขนาด (ยาว × กว้าง × สูง) | 193 × 135 × 415 มม |
| ความเร็ว | 7 ซม./วินาที (ความเร็วในการเดินแบบปรับได้) |
| แหล่งจ่ายไฟ | แบตเตอรี่ Li-Po ขนาด 11.1 โวลต์ 3500 มิลลิแอมป์ |
| กล้อง | กล้อง HD มุมกว้าง 120° ความละเอียด 1 MP (โฟกัสแบบแมนนวล 2 DOF) |
| โมดูล IMU | ไจโรสโคป 3 แกน + มาตรความเร่ง + เข็มทิศ |
| ข้อเสนอแนะ | การตรวจสอบแรงดันไฟฟ้า ตำแหน่ง และอุณหภูมิ |
| การสื่อสาร | พอร์ต Wi-Fi / USB / ซีเรียล |
| ซอฟต์แวร์ควบคุม | แอป WonderROS (Android/iOS) และโปรแกรมแก้ไขภาพ AiNex |
| การจำลองการเคลื่อนไหว | รองรับการจำลอง Gazebo 3D |
| ภาษาโปรแกรม | หลาม / C++ |
| ประเภทการติดตั้ง | ประกอบแล้วพร้อมวิ่ง |
| น้ำหนัก | น้ำหนักเบาสำหรับการศึกษาเดสก์ท็อป |
| การรับประกัน | 1 ปี |
รูปภาพสินค้า:






























