

หมวดจำนวน:0 การ:บรรณาธิการเว็บไซต์ เผยแพร่: 2568-05-21 ที่มา:เว็บไซต์








เมื่อเร็ว ๆ นี้การประชุมระดับโลก ICRA 2025 ในสาขาหุ่นยนต์และระบบอัตโนมัติเปิดในแอตแลนต้าสหรัฐอเมริกา วิธีการของ 'เพิ่มการประเมินความตั้งใจของมนุษย์และการจัดสรรบทบาทสำหรับการทำงานร่วมกันของหุ่นยนต์มนุษย์ ' ที่เสนอร่วมกันโดยสถาบันระบบอัตโนมัติของสถาบันวิทยาศาสตร์แห่งจีนและ Lingbao Casbot ได้รับการยอมรับจาก ICRA 2025
01. DTRT: เพิ่มการประเมินความตั้งใจของมนุษย์และการจัดสรรบทบาทเครื่องจักรของมนุษย์ในการทำงานร่วมกันของเครื่องทางกายภาพของมนุษย์
การประเมินความตั้งใจของมนุษย์ที่แม่นยำและการจัดสรรบทบาทของมนุษย์ที่สมเหตุสมผลนั้นมีความสำคัญต่อการทำงานร่วมกันอย่างปลอดภัยและมีประสิทธิภาพในการทำงานร่วมกันของหุ่นยนต์มนุษย์ (PHRC) วิธีการที่มีอยู่ซึ่งพึ่งพาข้อมูลการเคลื่อนไหวระยะสั้นสำหรับการประมาณความตั้งใจขาดความสามารถในการทำนายหลายขั้นตอนซึ่งขัดขวางความสามารถของหุ่นยนต์ในการรับรู้การเปลี่ยนแปลงความตั้งใจในระยะยาวและปรับการจัดสรรเครื่องจักรของมนุษย์อย่างเป็นอิสระ เพื่อแก้ปัญหาเหล่านี้สถาบันระบบอัตโนมัติของ Chinese Academy of Sciences และ Lingbao Casbot ร่วมกันเสนอกรอบ Robot Tracker (DTRT) แบบสองหม้อแปลง เฟรมเวิร์กใช้โครงสร้างแบบลำดับชั้นและใช้ข้อมูลการเคลื่อนที่ของมนุษย์และการบังคับใช้ข้อมูลเพื่อจับภาพการเปลี่ยนแปลงความตั้งใจของมนุษย์อย่างรวดเร็วเพื่อให้บรรลุการทำนายวิถีการเคลื่อนที่ที่แม่นยำและการปรับพฤติกรรมหุ่นยนต์แบบไดนามิก
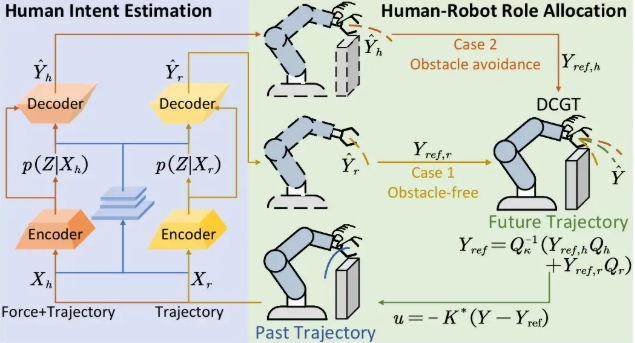
Robot Tracker บนพื้นฐานของหม้อแปลงคู่สำหรับการประมาณความตั้งใจของมนุษย์และการกำหนดบทบาท
โดยเฉพาะการประเมินความตั้งใจของมนุษย์ใน DTRT ใช้สองตัวแปร Autoencoders แบบแปรผันตามเงื่อนไข (CVAE) เพื่อรวมข้อมูลการเคลื่อนไหวของหุ่นยนต์ในสถานการณ์ที่ปราศจากสิ่งกีดขวางกับวิถีและแรงชี้นำของมนุษย์ในระหว่างการหลีกเลี่ยงอุปสรรค นอกจากนี้เรายังใช้ทฤษฎีเกมสหกรณ์ที่แตกต่าง (DCGT) บนพื้นฐานของแรงประยุกต์ของมนุษย์เพื่อรวมการคาดการณ์ทั้งสองเพื่อให้มั่นใจว่าพฤติกรรมของหุ่นยนต์นั้นสอดคล้องกับความตั้งใจของมนุษย์ เมื่อเปรียบเทียบกับวิธีการที่มีอยู่ DTRT รวมพลวัตของมนุษย์ไว้ในการทำนายระยะยาวให้ความเข้าใจที่ตั้งใจอย่างแม่นยำบรรลุการจัดสรรบทบาทที่สมเหตุสมผลและเพิ่มความเป็นอิสระและการทำงานของหุ่นยนต์
02. การทำงานร่วมกันของมนุษย์ทางกายภาพต้องเผชิญกับความท้าทายสองประการของการทำนายเจตนาและการจัดสรรบทบาท
การทำงานร่วมกันของมนุษย์ทางกายภาพ (PHRC) มีความสำคัญในการผลิตการดูแลสุขภาพและบริการ จำเป็นต้องมีกลยุทธ์ที่มีประสิทธิภาพเพื่อให้แน่ใจว่าหุ่นยนต์สามารถร่วมมือกับมนุษย์ได้อย่างราบรื่นประเมินความตั้งใจอย่างถูกต้องและปรับพฤติกรรมแบบไดนามิกเพื่อช่วยเหลือมนุษย์ ดังนั้นการประเมินความตั้งใจของมนุษย์ที่แม่นยำและการจัดสรรบทบาทเครื่องจักรของมนุษย์ที่สมเหตุสมผลจึงเป็นความท้าทายที่สำคัญในการปรับปรุงประสิทธิภาพของ PHRC
การทำนายที่ถูกต้องของวิถีในอนาคตบนพื้นฐานของความตั้งใจของมนุษย์เป็นสิ่งสำคัญสำหรับประสิทธิภาพของความช่วยเหลือหุ่นยนต์และความปลอดภัยของ PHRC ในสภาพแวดล้อมที่ซับซ้อนที่มีอันตรายที่อาจเกิดขึ้นเช่นเมื่อหุ่นยนต์พบอุปสรรคที่ไม่รู้จักการเปลี่ยนแปลงอย่างรวดเร็วในความตั้งใจของมนุษย์ก่อให้เกิดความท้าทายที่สำคัญในการประเมินความตั้งใจ วิธีการปัจจุบันส่วนใหญ่อาศัยข้อมูลการเคลื่อนไหวระยะสั้นเช่นตำแหน่งและความเร็วซึ่ง จำกัด การตรวจจับการเปลี่ยนแปลงความตั้งใจของมนุษย์และจะส่งผลกระทบต่อความแม่นยำและความปลอดภัยของการทำนาย
นอกจากนี้ข้อมูลระยะสั้นสามารถลดประสิทธิภาพของการประมาณความตั้งใจในการทำงานร่วมกันในระยะยาว ดังนั้นการค้นคว้าวิธีการทำนายระยะยาวที่รวมกองกำลังประยุกต์ของมนุษย์เข้ากับ PHRC จึงเป็นสิ่งสำคัญสำหรับการบรรลุการประมาณความตั้งใจที่แม่นยำ นอกจากนี้การจัดสรรบทบาทของมนุษย์เครื่องจักรเกี่ยวข้องกับกลไกที่ซับซ้อนสำหรับการกำหนดการควบคุมงานระหว่างมนุษย์และหุ่นยนต์ กระบวนการนี้จะประสานความสัมพันธ์กับเครื่องจักรของมนุษย์แบบเรียลไทม์ลดความขัดแย้งและปรับปรุงระดับความช่วยเหลือของหุ่นยนต์ วิธีการที่มีอยู่ส่วนใหญ่ขึ้นอยู่กับการควบคุมความต้านทาน/การปฏิบัติตามกฎระเบียบและกำหนดบทบาทโดยการปรับเปลี่ยนพารามิเตอร์โมเดล ในบรรดาวิธีการต่าง ๆ การจัดสรรบทบาทตามทฤษฎีเกมจะจำลองกระบวนการทำงานร่วมกันระหว่างผู้เข้าร่วมหลายคนโดยมีเป้าหมายในการลดฟังก์ชั่นต้นทุนเพื่อให้บรรลุการทำงานร่วมกันของเครื่องจักรมนุษย์ที่ดีที่สุด อย่างไรก็ตามการทำให้มั่นใจว่าพฤติกรรมหุ่นยนต์นั้นสอดคล้องกับความตั้งใจของมนุษย์ในขณะที่รักษาความเป็นอิสระและความยืดหยุ่นยังคงเป็นความท้าทายที่สำคัญ
03. DTRT แสดงข้อได้เปรียบที่สำคัญในความแม่นยำในการทำนายและประสิทธิภาพการทำงานร่วมกัน
ผลการทดลองแสดงให้เห็นว่า DTRT มีข้อได้เปรียบอย่างมีนัยสำคัญในการทำนายความแม่นยำแสดงประสิทธิภาพที่ยอดเยี่ยมในตัวชี้วัดการทำงานร่วมกันของเครื่องจักรกลมนุษย์ทางกายภาพหลายตัวลดความแตกต่างของเครื่องจักรมนุษย์และปรับปรุงระดับความช่วยเหลือของหุ่นยนต์ ข้อดีหลักของ DTRT อยู่ในสามคะแนนต่อไปนี้:
DTRT ผสมผสานการประเมินความตั้งใจของมนุษย์กับการจัดสรรบทบาทของมนุษย์ในการตรวจจับการเปลี่ยนแปลงความตั้งใจและลดความแตกต่างของเครื่องจักรมนุษย์ช่วยปรับปรุงประสิทธิภาพการทำงานร่วมกันของมนุษย์ในเครื่องจักรในสภาพแวดล้อมที่ซับซ้อนและอันตราย
2. การประเมินความตั้งใจของมนุษย์ตามโครงสร้างแบบลำดับชั้นใน DTRT พร้อมกันประมวลผลการเคลื่อนไหวและการบังคับข้อมูลในการทำงานร่วมกันของมนุษย์เครื่องช่วยปรับปรุงความแม่นยำในการทำนายของเจตนาของมนุษย์และให้ความเข้าใจที่แม่นยำเกี่ยวกับเจตนา
3. การจัดสรรบทบาทของมนุษย์กับมนุษย์ตามทฤษฎีเกมสหกรณ์ที่แตกต่างตระหนักถึงการสลับผู้นำแบบปรับตัวได้ตามแรงที่มนุษย์กระทำเพื่อให้มั่นใจว่าพฤติกรรมของหุ่นยนต์นั้นสอดคล้องกับความตั้งใจของมนุษย์และลดความแตกต่างในขณะที่ยังคงความเป็นอิสระของหุ่นยนต์
ในแง่ของประสิทธิภาพการทำงานร่วมกันของเครื่องจักรมนุษย์ทางกายภาพใช้ตัวชี้วัดต่อไปนี้:
ในการทดลองเราแทนที่และอุปสรรคที่ตั้งอยู่แบบสุ่ม ผลการวิจัยพบว่า DTRT มีประสิทธิภาพสูงกว่าวิธีการที่มีอยู่ในสถานการณ์การทำงานร่วมกันของมนุษย์ทางกายภาพ มุมการทำงานร่วมกันของมนุษย์โดยเฉลี่ยของ DTRT คือ 76.4 °ดัชนีระดับความช่วยเหลือหุ่นยนต์เฉลี่ยคือ 1.5 และระบบเครื่องจักรของมนุษย์อยู่ในสถานะการทำงานร่วมกัน 61.8% ของเวลา นอกจากนี้การจัดสรรบทบาทของมนุษย์ในมนุษย์ได้อย่างมีประสิทธิภาพทำให้ความเป็นอิสระของหุ่นยนต์และคำแนะนำของมนุษย์มีประสิทธิภาพส่งผลให้งานเครื่องจักรกลของมนุษย์เพียง 3.5 J โดยรวมแล้ว DTRT ประมาณการการเปลี่ยนแปลงในความตั้งใจของมนุษย์อย่างถูกต้องจัดสรรบทบาทของผู้นำและผู้ติดตามอย่างสมเหตุสมผลซึ่งจะช่วยลดความแตกต่างของเครื่องจักรของมนุษย์ปรับปรุงระดับความช่วยเหลือหุ่นยนต์และส่งเสริมการทำงานร่วมกันทางร่างกายของมนุษย์ที่ปลอดภัยและมีประสิทธิภาพ
การเปรียบเทียบเชิงปริมาณระหว่าง DTRT และวิธีการที่มีอยู่ในแง่ของตัวบ่งชี้
ข้อเสนอของ DTRT ไม่เพียง แต่เป็นการพัฒนาอัลกอริทึม แต่ยังเป็นความพยายามที่จะสร้างความสัมพันธ์ 'เครื่องจักรของมนุษย์ ': มันเป็นเส้นทางทางเทคนิคสำหรับการพัฒนาหุ่นยนต์มนุษย์ที่ผสมผสานความเป็นสากลและคุณค่าทางวิศวกรรม ในอนาคตแนวคิดการวิจัยและกลไกหลักของ DTRT คาดว่าจะยังคงขยายและลึกซึ้งยิ่งขึ้นในสถานการณ์การใช้งานที่หลากหลายที่เน้นโดย Lingbao Casbot เช่นการผลิตอุตสาหกรรมการดำเนินงานที่ซับซ้อนและการทำงานร่วมกันบริการ
















